|
laserIMUCalibration
|
|
laserIMUCalibration
|
#include <dirent.h>#include <vector>#include <string>#include <iostream>#include <pcl/common/io.h>#include <pcl/io/pcd_io.h>#include "laserNAVCalib.h"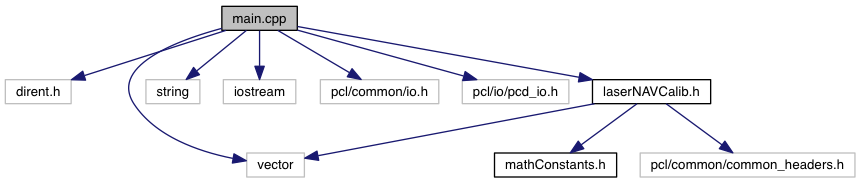
Go to the source code of this file.
Typedefs | |
| typedef pcl::PointNormal | PointT |
| typedef pcl::PointCloud< PointT > | pointCloud |
Functions | |
| std::vector< std::string > | open (std::string path=".") |
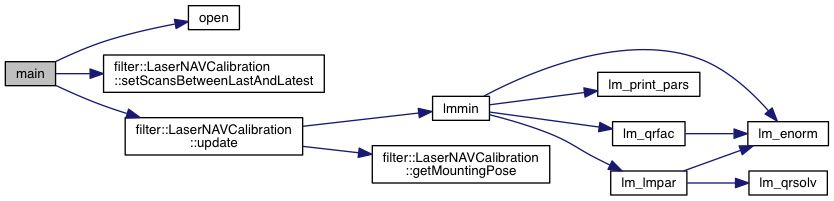
| int | main (int argc, char *argv[]) |
Copyright 2015 michael.r141@gmail.com
Definition in file main.cpp.
| typedef pcl::PointCloud<PointT> pointCloud |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
 1.8.10
1.8.10